I'm Ben, a Robotics Engineer based in the UK.
I specialise in _
/// Looking for a full-stack robotics expert with both software and hardware skills to join your team? Then give me a shout!

I am a creative, adaptable, and hardworking individual who thrives on solving complex challenges. My career is defined by a successful decade in Entrepreneurship, where I demonstrated the drive and strategic capability to build (and successfully exit) a financial services business from a £5,000 seed investment to a successful enterprise with an annual turnover exceeding £1 million and profits of over £250,000.
After selling my stake in October 2024, I pivoted to fully pursue my deep passion for Robotics. I subsequently committed three years to intensive, full-time study to acquire the comprehensive technical expertise now essential to my professional identity. This dedicated training has led to a mastery of both the theoretical and practical skills required to design, build, test, and deploy sophisticated robotic solutions.
My core technical competencies include proficiency in ROS, Python, C++, Machine Learning (OpenCV, TensorFlow), Embedded Systems, SLAM and Navigation, Real-to-sim, NVIDIA's Isaac Suite, and a deep understanding of Robot Kinematics, Manipulation, Path Planning, and Perception. Furthermore, I have attained a HNC qualification in Mechanical Engineering, ensuring my technical application is grounded in solid mechanical and mathematical principles. My portfolio showcases my ability to translate these advanced concepts into tangible, working robotic systems.
In addition, I founded and currently run the Warwickshire Robotics Society (a community of robotics enthusiasts who meet to network, share ideas, and collaborate on projects) and sit on the board of The Leamington Highline (a community project to convert the disused railway viaducts into shared spaces) where I perform an advisory role on technical and commercial matters.



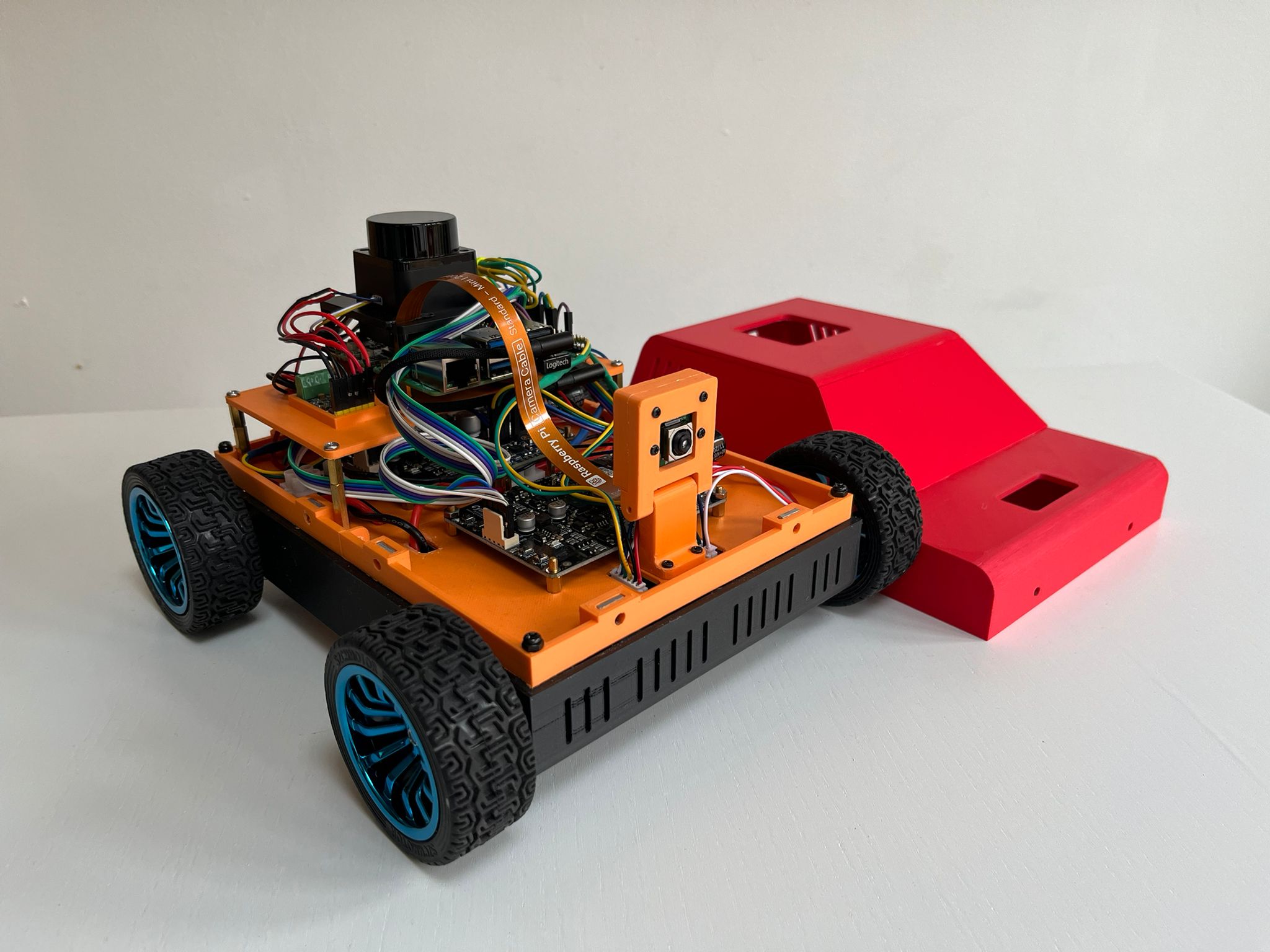
A slam-enabled, Nav2 enabled, four-wheeled, diff-drive custom robot (the real physical thing) with lidar, camera, wheel encoders, and IMU sensor.
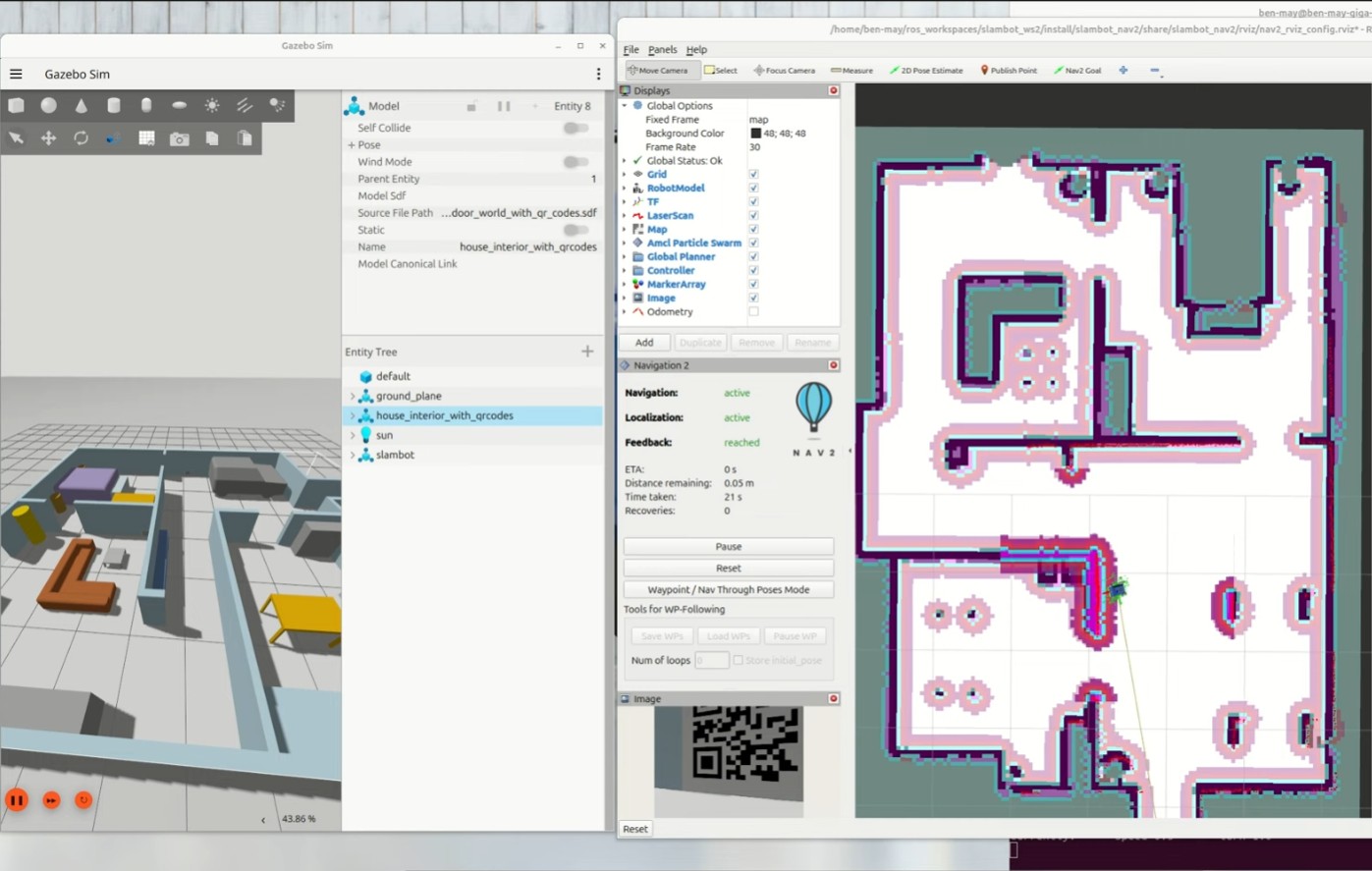
A slam-enabled, Nav2 enabled, four-wheeled, diff-drive custom robot (running in simulation).
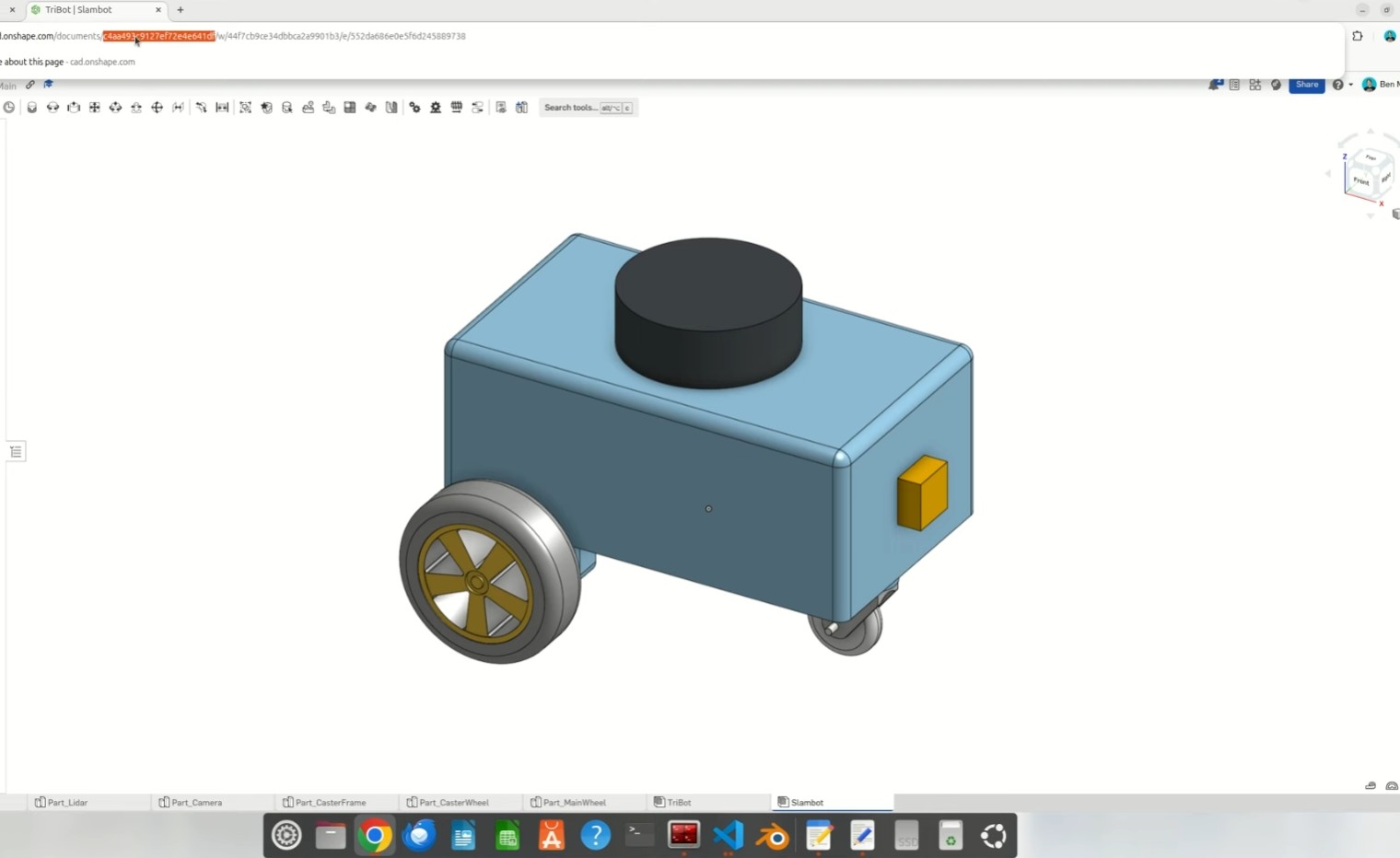
My workflow for designing robot on OnShape, using 'onshape-to-robot' to export to URDF + amendments to turn into a Xacro enabled structure, with Lidar, Camera, Gazebo Plugins & custom launch files.
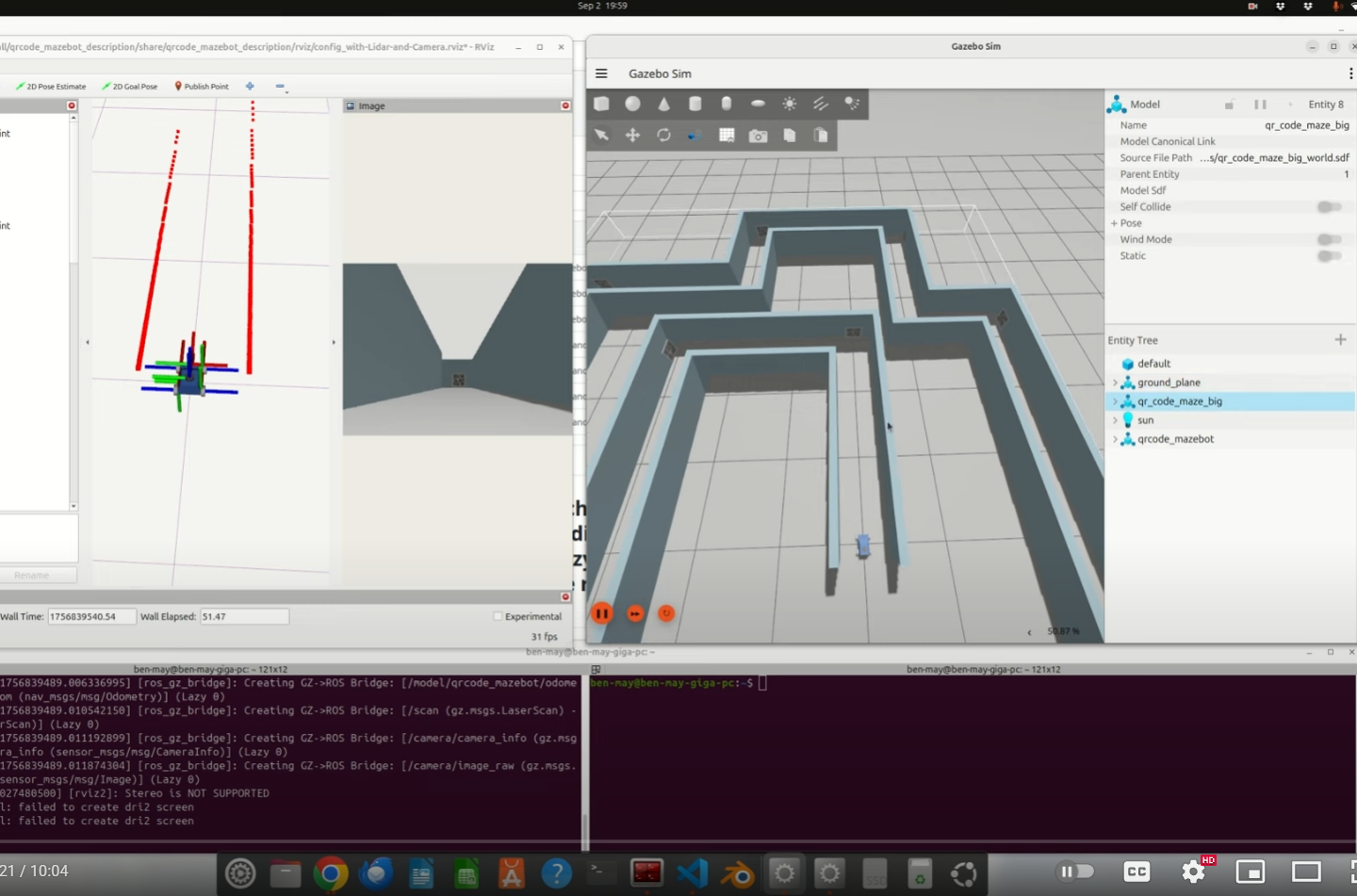
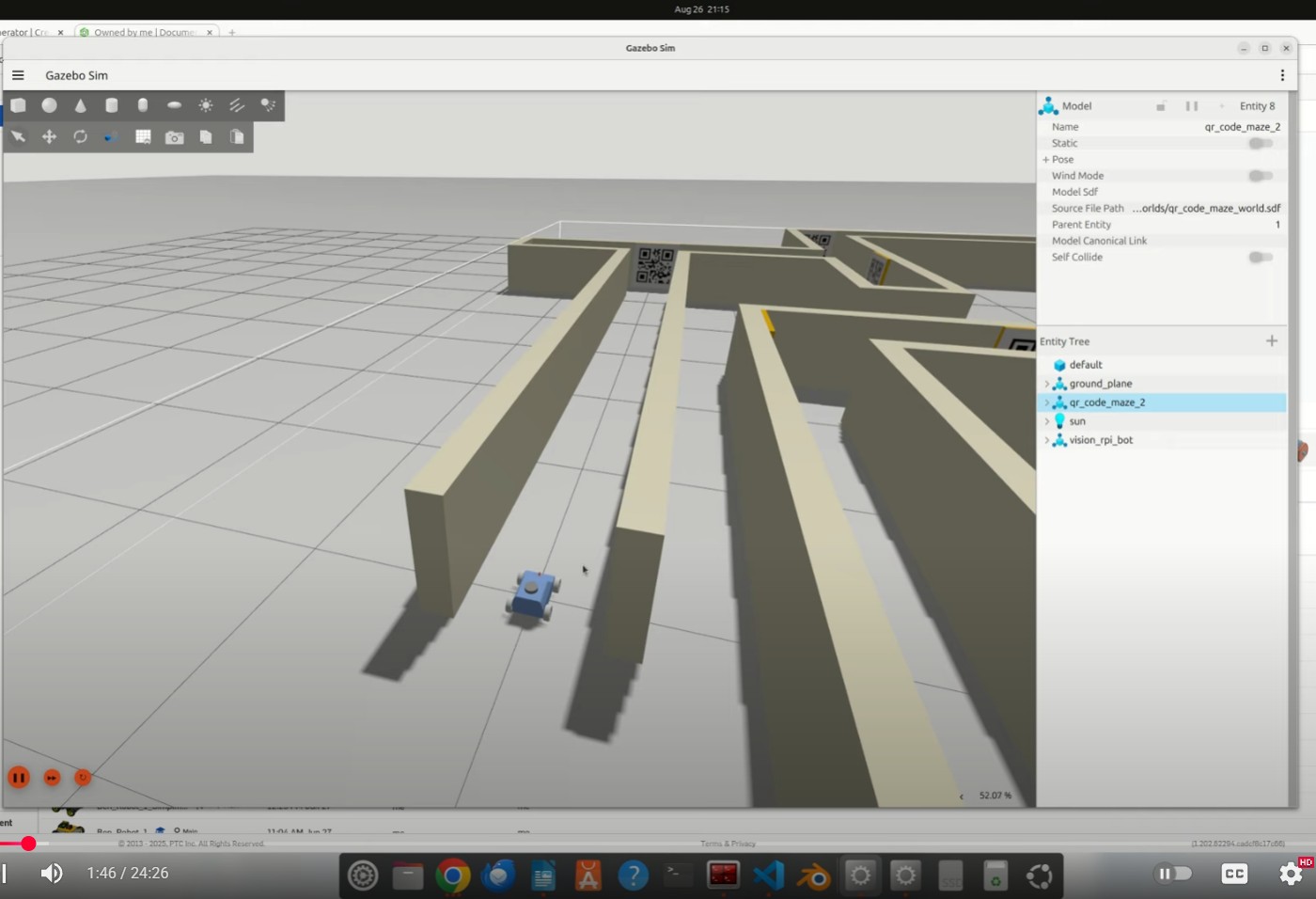
Robot which drives round a maze (using wall-following algorithm) and uses OpenCV to read QR codes for directions.
A video on my workflow for creating custom Gazebo models with textures.
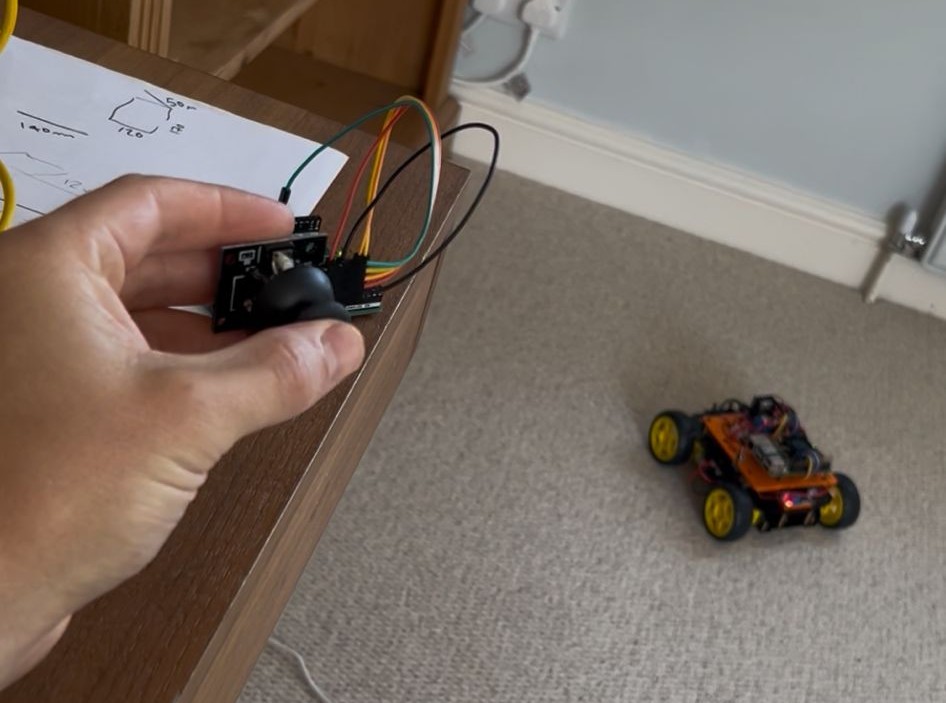
Sends commands from an Arduino Joy Stick via a local ROS2 program to a RaspberryPi on the robot via Wifi.
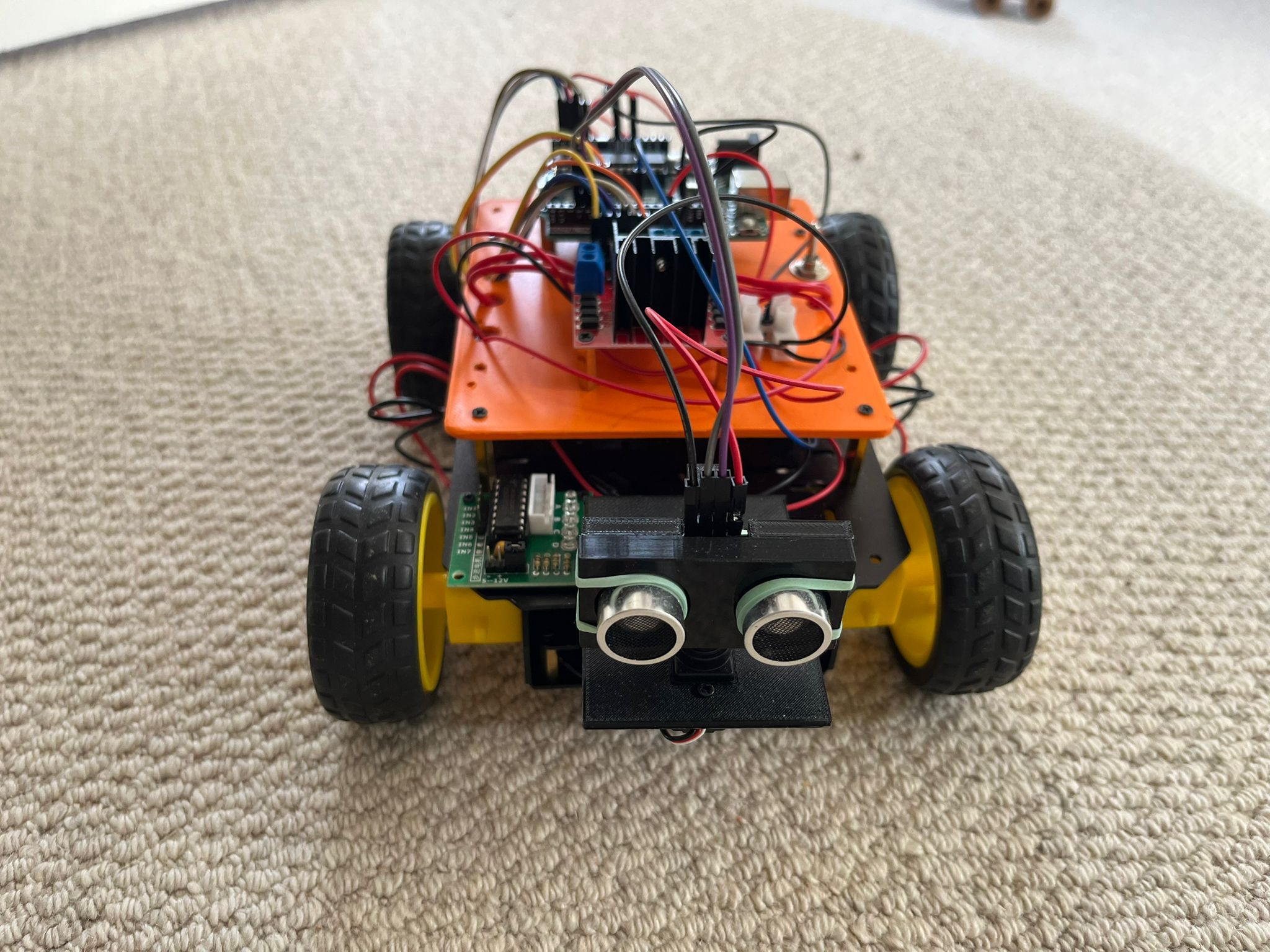
A simple obstacle avoider using ultrasonic sensors, PID control and an Arduino.
| Description | Institution | Year | Grade (click to view evidence) |
|---|---|---|---|
| LLB Law (Bachelors) Degree | Queen Mary University London | 2012 | First Class Honors + Principal's Award For Academic Excellence |
| CF1 Financial Services, Regulations & Ethics | Chartered Insurance Institute | 2013 | Pass With Distinction |
| Further Mathematics For Engineering | Pearson | 2024 | Pass With Distinction |
| HNC Mechanical Engineering | Teeside University | 2025 | Pass With Distinction |
| Fundamental Skills in Engineering Design | University of Leeds (via Coursera) | 2024 | Passed (Non-Graded) |
| Arduino (Object Oriented) | Udemy | 2024 | See Certificate |
| Complete C++ Course | Tim Buchalka's Programming Academy | 2025 | See Certificate |
| ROS2 Level 1 Course | Edouard Renard (Udemy) | 2025 | See Certificate |
| ROS2 Level 2 Course | Edouard Renard (Udemy) | 2025 | See Certificate |
| ROS2 Level 3 (Advanced) Course | Edouard Renard (Udemy) | 2025 | See Certificate |
| ROS2 Nav2 Course | Edouard Renard (Udemy) | 2025 | See Certificate |
| ROS2 Control Course | Edouard Renard (Udemy) | 2025 | See Certificate |